Présentation
RÉSUMÉ
Les interfaces à retour d’effort sont des périphériques permettant de commander un robot à distance ou un avatar dans un environnement virtuel en ressentant les forces et les moments auxquels ils sont soumis. Pour que l’immersion de l’utilisateur soit naturelle et qu’il puisse commander ces dispositifs de façon efficace et intuitive, il faut que ces interfaces respectent un certain nombre de critères. Ces spécifications sont différentes de celles des robots industriels, de même que les technologies mises en œuvre pour y répondre. Dans cet article, nous présentons tous ces éléments, puis nous introduisons des outils de modélisation et de dimensionnement robotiques permettant de concevoir des interfaces répondant à ce cahier des charges. Leur application est illustrée sur deux exemples.
Lire cet article issu d'une ressource documentaire complète, actualisée et validée par des comités scientifiques.
Lire l’articleAuteur(s)
-
Florian GOSSELIN : Responsable scientifique - Département Intelligence Ambiante et Systèmes Interactifs - Université Paris-Saclay, CEA, List, F-91120, Palaiseau, France
INTRODUCTION
Il existe de nombreux domaines dans lesquels l’humain ne peut pas intervenir directement parce que l’environnement est hostile ou inaccessible à son échelle. Pour intervenir dans de tels environnements, on doit utiliser des robots avantageusement pilotés à distance. La solution la plus efficace pour les commander est d’utiliser des bras maîtres à retour d’effort.
Des dispositifs similaires sont utilisés pour interagir avec des environnements simulés en réalité virtuelle. La maquette numérique, qui remplace de plus en plus les prototypes physiques lors de la conception de nouveaux produits et systèmes, permet de simuler le montage d’un système complexe, de détecter et de corriger les erreurs très en amont du cycle de conception, ou encore de concevoir une véritable usine virtuelle visant à optimiser l’ergonomie et la productivité des postes de travail. Son utilisation efficace requiert cependant des méthodes et des périphériques adaptés. Dans ce contexte, les interfaces à retour d’effort sont particulièrement intéressantes. Elles peuvent être utilisées pour contrôler les mouvements de certains objets de la scène virtuelle et permettent à l’utilisateur de ressentir les efforts qui s’appliquent sur ces objets quand ils entrent en collision avec leur environnement, comme dans le monde réel. On parlera ici d’« interfaces haptiques » plutôt que de bras maîtres.
Dans les deux cas, on a affaire à des structures mécaniques polyarticulées plus ou moins complexes munies de capteurs et d’actionneurs, c’est-à-dire à de véritables robots. Les interfaces à retour d’effort sont cependant très différentes des robots industriels, qui sont en général commandés en position pour suivre des trajectoires de façon répétitive indépendamment des perturbations extérieures, dans un environnement contrôlé dont l’humain est exclu. Au contraire, les interfaces à retour d’effort sont manipulées par un utilisateur, et doivent donc présenter un haut niveau de sûreté et de sécurité. Elles doivent également avoir une grande sensibilité en effort et une grande dynamique pour être capables de suivre tous les gestes de l’opérateur et de restituer le moindre effort appliqué sur le robot distant ou l’avatar de l’utilisateur en réalité virtuelle, que ces interfaces soient munies d’une simple poignée ou qu’elles aient une architecture plus complexe, comme sur les exosquelettes de bras ou de main.
Ces contraintes de performance et de sécurité requièrent le respect d’un certain nombre de critères et la mise en œuvre de solutions technologiques adaptées. Cet article présente ces critères et leurs valeurs usuelles, puis il introduit des outils de modélisation et de dimensionnement robotiques permettant de concevoir des interfaces répondant à ces besoins. Leur application sera illustrée par plusieurs exemples.
Cet article est réservé aux abonnés.
Il vous reste 94 % à découvrir.
Déjà abonné ? Se connecter
MOTS-CLÉS
réalité virtuelle Robotique conception optimisation téléopération Retour d’effort Dimensionnement
DOI (Digital Object Identifier)
Présentation
Article inclus dans l'offre
Actualisée et enrichie d’articles validés par nos comités scientifiques.
Quiz, médias, tableaux, formules, vidéos, etc.
Opérationnels et didactiques, pour garantir l'acquisition des compétences transverses.
Un ensemble de services exclusifs en complément des ressources.
3. Conclusion
Les interfaces à retour d’effort sont de puissants outils permettant de commander un robot esclave à distance ou un avatar en réalité virtuelle. Sous réserve de respecter des contraintes de sécurité et de performances spécifiques au domaine, l’utilisateur peut interagir de façon efficace et intuitive en environnement hostile ou virtuel, avec retour d’effort.
Dans cet article, les principaux critères à respecter sur ce type d’interfaces et les valeurs usuelles de ces critères ont été présentés, ainsi que les outils de modélisation et de dimensionnement utilisés pour atteindre ces valeurs, et les technologies les plus adaptées au domaine. L’application de ces outils a été illustrée par deux exemples, le premier concernant la conception d’une interface haptique pour la formation au geste chirurgical, le second concernant le design d’un gant à retour d’effort pour la conception de planches de bord automobiles en environnement virtuel.
Au-delà des applications historiques liées à la téléopération en milieu hostile et aux interactions en réalité virtuelle, le domaine a été marqué récemment par plusieurs évolutions majeures porteuses de nouveaux besoins et de nouvelles opportunités :
-
Développement de l’usage de la maquette numérique
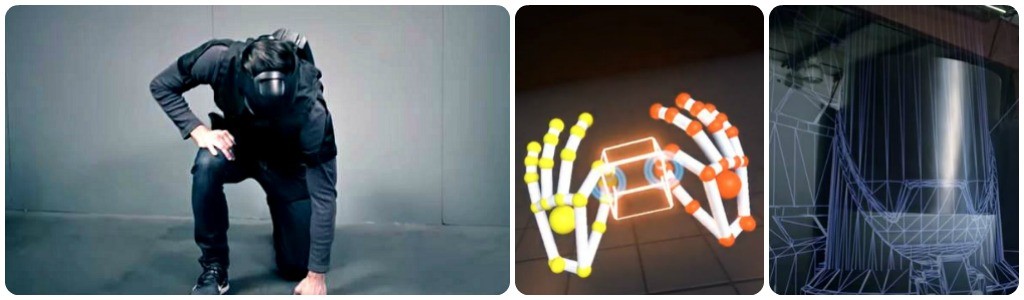
Les simulations en réalité virtuelle s’étendent désormais, dans l’industrie, à l’usine numérique tout entière, c’est-à-dire à l’ensemble des process et de leur environnement, produits fabriqués, outils et opérateurs compris. Ces simulations permettent de former les opérateurs à des tâches de plus en plus variées et de faire des études d’ergonomie des postes de travail avant même que les usines ne sortent de terre. Cette évolution requiert la simulation de tâches toujours plus complexes et à l’échelle 1, ce qui demande des interfaces dont l’espace de travail et les capacités en effort sont toujours plus importants. On voit apparaître pour répondre à ces besoins des robots redondants comme le système Scale 1 d’Haption ou des exosquelettes de bras et de mains. On notera que, pour ces applications, les interfaces à retour d’effort sont avantageusement associées à des systèmes de capture de mouvement (e.g. systèmes ART, Microsoft Kinect, Leapmotion, etc.) qui permettent de mesurer précisément les mouvements de l’ensemble du...
Cet article est réservé aux abonnés.
Il vous reste 93 % à découvrir.
Déjà abonné ? Se connecter
Conclusion
Article inclus dans l'offre
Actualisée et enrichie d’articles validés par nos comités scientifiques.
Quiz, médias, tableaux, formules, vidéos, etc.
Opérationnels et didactiques, pour garantir l'acquisition des compétences transverses.
Un ensemble de services exclusifs en complément des ressources.
BIBLIOGRAPHIE
-
(1) - JOLY (L.) - Commande hybride position/force pour la téléopération : une approche basée sur des analogies mécaniques, - Thèse de doctorat de l’université Paris 6, Paris, France (octobre 1997).
-
(2) - ALIAGA (I.), RUBIO (A.), SANCHEZ (E.) - Experimental quantitative comparison of different control architectures for master-slave teleoperation, - IEEE Trans. on Control Systems Technology, Volume 12, issue 1, pp. 2-11 (janvier 2004).
-
(3) - VERTUT (J.), COIFFET (P.) - Les robots-Tome 3A : téléopération, évolution des technologies, - Hermes Publishing, Paris, France (1984).
-
(4) - KÖHLER (G.W.) - Typenbuch der Manipulatoren – Manipulator type book, - Thiemig Taschenbücher – Verlag Karl Thiemig, München, Germany (1981).
-
(5) - SCHENKER (P.) - NASA research and development for space telerobotics, - IEEE Trans. on Aerospace and Electronic Systems, Volume 24, Issue 5, pp. 523-534 (septembre 1998).
- ...
DANS NOS BASES DOCUMENTAIRES
-
...
NORMES
-
Postures et dimensions pour l’homme au travail sur machines et appareils [annulée le20 mai 2003] - NF X35-104 - Avril 1983
-
Modèles anthropométriques de la population masculine et feminine [annulée le 5 juillet 2019] - X35-002 - Juillet 1982
ANNEXES
Haption
https://www.haption.com/fr/products-fr.html
(page de presentation des interfaces à retour d’effort, consultée en octobre 2020)
CyberGlove Systems, CyberGrasp
http://www.cyberglovesystems.com/cybergrasp
(consulté en août 2020)
CyberGlove Systems, CyberForce
http://www.cyberglovesystems.com/cyberforce
(consulté en août 2020)
Dexta Robotics
https://www.dextarobotics.com/en-us/#specifications
(consulté en août 2020)
HaptX
(consulté en août 2020)
Senseglove
(consulté en août 2020)
KineteK Wearable Robotics
http://www.wearable-robotics.com/kinetek/products/alex/features/
(consulté en août 2020)
HAUT DE PAGE
University of Tsukuba, VR Lab
http://eva.vrlab.esys.tsukuba.ac.jp/
(consulté en août 2020)
...
Cet article est réservé aux abonnés.
Il vous reste 92 % à découvrir.
Déjà abonné ? Se connecter
Article inclus dans l'offre
Actualisée et enrichie d’articles validés par nos comités scientifiques.
Quiz, médias, tableaux, formules, vidéos, etc.
Opérationnels et didactiques, pour garantir l'acquisition des compétences transverses.
Un ensemble de services exclusifs en complément des ressources.