
Les informations fournies à partir des données LiDAR par la start-up Outsight correspondent aux exigences spécifiques du véhicule autonome.
Raul Bravo, président et fondateur d’Outsight, a expliqué à Techniques de l’Ingénieur en quoi tout le potentiel autour du LiDAR ne serait pas totalement exploité aujourd’hui.
Techniques de l’Ingénieur : Pourriez-vous revenir sur la genèse de la start-up Outsight ?
Raul Bravo : Outsight est issu d’une société, Dibotics, qui à l’époque de l’émergence des capteurs LiDAR était en pointe en matière de traitement des données en temps réel, notamment pour les navettes autonomes. Dibotics produisait alors des algorithmes pour traiter ce type de données. Outsight a intégré Dibotics pour “productiser” ces algorithmes [en faire un produit commercial acceptable, NDLR.] et en faire des outils facilement utilisables.
Outsight a donc pour mission de faire en sorte que le traitement des données LiDAR en temps réel de Dibotics soit facilement utilisable et intégrable, pour être installé dans n’importe quel produit, que ce soit un véhicule autonome, un robot ou une machine industrielle…
Ce n’est pas encore le cas aujourd’hui ?
Non, ce n’est pas le cas. Les données transmises par un capteur LiDAR sont très différentes de celles que l’on obtient en utilisant une caméra. En effet, une caméra est un capteur passif, c’est-à-dire qu’elle fonctionne avec la lumière qu’elle reçoit. Nous disposons aujourd’hui de capteurs ayant une résolution très importante, ils sont d’ailleurs présents dans tous nos smartphones.
Le LiDAR est lui un capteur actif, il génère de la lumière. C’est ce qui l’empêche de proposer une résolution aussi importante que les caméras.
Par contre le LiDAR apporte quelque chose qui le rend intéressant et que la caméra ne propose pas : la 3D. La 3D va permettre de voir des volumes, de distinguer des objets, ce qui est fondamental, par exemple dans le cas du développement des véhicules autonomes. Prenons un exemple : une caméra va pouvoir repérer un individu situé autour d’un véhicule, mais ne pourra pas donner d’information précise sur son emplacement exact. Or, la précision de ce type d’information est une des clés pour développer des véhicules autonomes fiables et sûrs.
Cet aspect spatial des données est crucial, pour le véhicule autonome mais également dans beaucoup d’autres domaines. C’est ce qui rend le LiDAR si intéressant.
Comment traitez-vous ces données LiDAR ?
Ce sont des données extrêmement complexes à traiter. C’est la mission d’Outsight de travailler sur ces données pour les rendre plus accessibles. Elles sont par nature éparses, il nous faut donc développer des moyens d’en tirer tout le potentiel, et en extraire l’information dont on a besoin : S’il y a un individu en amont du véhicule : est-il sur le trottoir, sur la route, faut-il freiner, changer de trajectoire… nous devons être en mesure de fournir de manière fiable les données menant à ces actions.
Et Outsight est-il en mesure de fournir ces informations à l’heure actuelle ?
Nous avons mené des tests de détection d’objets. Sur l’image ci-dessous, on voit à gauche les informations que fournit le LiDAR, et à droite l’exploitation que nous en faisons en temps-réel. Le but est de distinguer un pneu se situant une centaine de mètres devant le véhicule.
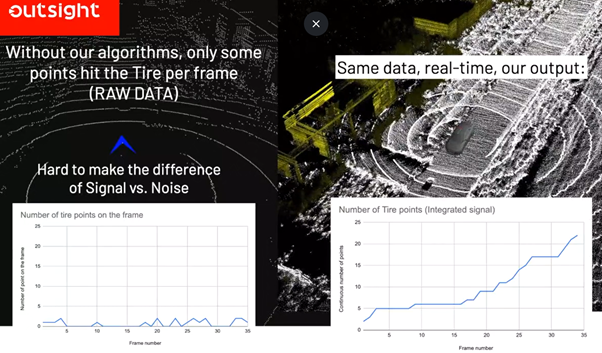
Sur l’image de gauche, il est impossible de distinguer le pneu. Sa présence au-dessus de la flèche bleue est caractérisée par une petite rupture d’onde.
Il est par contre clairement identifié sur l’image de droite, devant la voiture, en trois dimensions.
C’est une illustration des travaux que nous menons. Sous les images, on voit deux graphes indiquant combien de fois le LiDAR touche l’obstacle au fur et à mesure qu’il s’approche du pneu. En générant une “super résolution”, nous arrivons à cumuler l’information dont nous disposons, un peu comme le fait un humain avec ses yeux en se rappelant de ce qu’il a vu quelques instants auparavant, mais pas une caméra, qui elle ne fournit que des images instantanées.
Concrètement, la caméra ne propose ni plus ni moins qu’une succession de photos s’enchaînant rapidement. Ainsi, les logiciels de traitement de vidéos traitent en fait chaque image de la vidéo, l’une après l’autre. Les données transmises par le LiDAR étant d’une résolution limitée, de nombreux acteurs du marché ont abandonné l’idée de traiter les données LiDAR comme on traiterait une vidéo, arguant que le LiDAR est trop cher et pas assez performant. Nous pensons chez Outsight que les informations fournies par le LiDAR permettent aujourd’hui d’obtenir des résultats et une résolution suffisantes pour les besoins du véhicule autonome. L’idée est d’exploiter au maximum toutes les données que nous fournissent le LiDAR.
La technologie LiDAR n’est donc pas exploitée aujourd’hui au maximum ?
En effet. Disons qu’il ne faut pas écarter une technologie tant qu’on ne l’a pas exploitée au maximum. Nous entendons autour de nous que le LiDAR est une technologie qui n’est pas encore mûre… nous ne sommes pas d’accord et nous pensons qu’aujourd’hui le LiDAR n’est pas exploité comme il pourrait l’être.
Sur le véhicule autonome, y a-t-il un intérêt à combiner les spécificités des différents capteurs pour obtenir un résultat le plus fiable possible ?
Il y a deux raisons principales pour lesquelles on peut chercher à combiner différents capteurs. D’abord, on peut combiner des capteurs parce que chaque capteur a des imperfections. Par exemple, les caméras ne fonctionnent pas quand il n’y a pas de lumière, il faut donc un capteur complémentaire pour étendre l’aspect “vision” du véhicule en conditions nocturnes.
Ensuite, il y a l’épineuse question de la sécurité : si un capteur nous dit qu’il n’y a pas d’obstacle devant lui, il faut un second capteur qui confirme l’analyse du premier. C’est un principe de redondance, qui est même parfois étendu à trois capteurs, dans le cas où les deux premiers capteurs ne sont pas d’accord. Ces trois capteurs sont en général un LiDAR, un radar et une caméra, qui sont trois technologies très complémentaires les unes par rapport aux autres, puisqu’elles perçoivent toutes trois leur environnement de manière différente.
La problématique est donc de développer une complémentarité entre les technologies pour rendre le véhicule autonome fiable ?
Dans l’absolu oui, mais ce n’est malheureusement pas aussi simple que cela. Avant de parler de complémentarité des capteurs, il faut d’abord résoudre d’autres problématiques. Par exemple, quand on se penche sur le repérage d’objets qui se situeraient sur la trajectoire de la voiture, il faut être certain que les différents capteurs repèrent et se réfèrent bien aux mêmes objets. Sans quoi la complémentarité n’existe pas. Il faut donc des référentiels spatiaux et temporels communs. C’est ce que nous proposons avec notre logiciel via l’analyse en temps réel des informations. Cela permet de mettre en place un référentiel commun, pour favoriser le développement de cette complémentarité dans un cadre précis.
Quand-est ce que vous pensez voir un véhicule autonome évoluer librement en ville ?
Je peux vous dire précisément quand le véhicule autonome sera prêt, je peux vous dire dans quel environnement évoluera ce véhicule, mais je suis aujourd’hui incapable de vous donner ces deux informations en même temps ! Aujourd’hui il reste encore de nombreuses problématiques d’une extrême complexité, des infrastructures et une régulation efficace à mettre en place… cela va prendre un certain temps.
Propos recueillis par Pierre Thouverez
Image de une : Image obtenue grâce aux données LiDAR ©Outsight
Cet article se trouve dans le dossier :
Capteurs pour les véhicules autonomes : des défis toujours plus complexes à relever
- Capteurs pour les véhicules autonomes : entre complémentarité et redondance
- De multiples enjeux autour des données générées par les capteurs du véhicule autonome
- « Valeo a un leadership important sur les capteurs LiDAR »
- « Nous voulons faciliter l’intégration et l’utilisation des données LiDAR »
- « Le conducteur aura plus un rôle de supervision »
- L'autonomisation des véhicules comme vecteur de la mobilité
- Véhicules autonomes et connectés : plus de sécurité avec la 5G ?
- Les voitures autonomes menacent les centres-villes
- Les capteurs, technologies clés du véhicule autonome
- Les thèses du mois : Capteurs pour les véhicules autonomes, des défis toujours plus complexes à relever
- Capteurs pour les véhicules autonomes : des défis toujours plus complexes à relever
Dans l'actualité