
L’introduction d’humanoïdes sur les lignes d’assemblage aéronautiques permettra de décharger les opérateurs humains des tâches les plus laborieuses ou dangereuses. Ils pourront ainsi se concentrer sur des tâches à plus forte valeur ajoutée.
La principale difficulté pour ces robots sera de travailler dans un environnement exigu : comment réaliser certains mouvements sans entrer en collision avec les nombreux objets alentours ? C’est la première question à laquelle devront répondre les chercheurs, en développant de nouveaux algorithmes de planification et contrôle des mouvements précis.

Du fait de la taille des appareils aéronautiques (par exemple des avions de ligne) et du très grand nombre de tâches à effectuer sur peu d’unités, l’utilisation de robots spécialisés à base fixe, déjà utilisés dans l’industrie automobile, est impossible dans l’industrie aéronautique.
D’autres difficultés s’ajoutent : même si des robots constitués d’une base mobile et d’un bras manipulateur peuvent être utilisés par l’industrie (comme chez Airbus Group par exemple), ceux-ci sont limités dans leurs déplacements. Ils n’ont, en effet, pas la possibilité de monter des escaliers ou des échelles, de passer des obstacles au sol, etc.
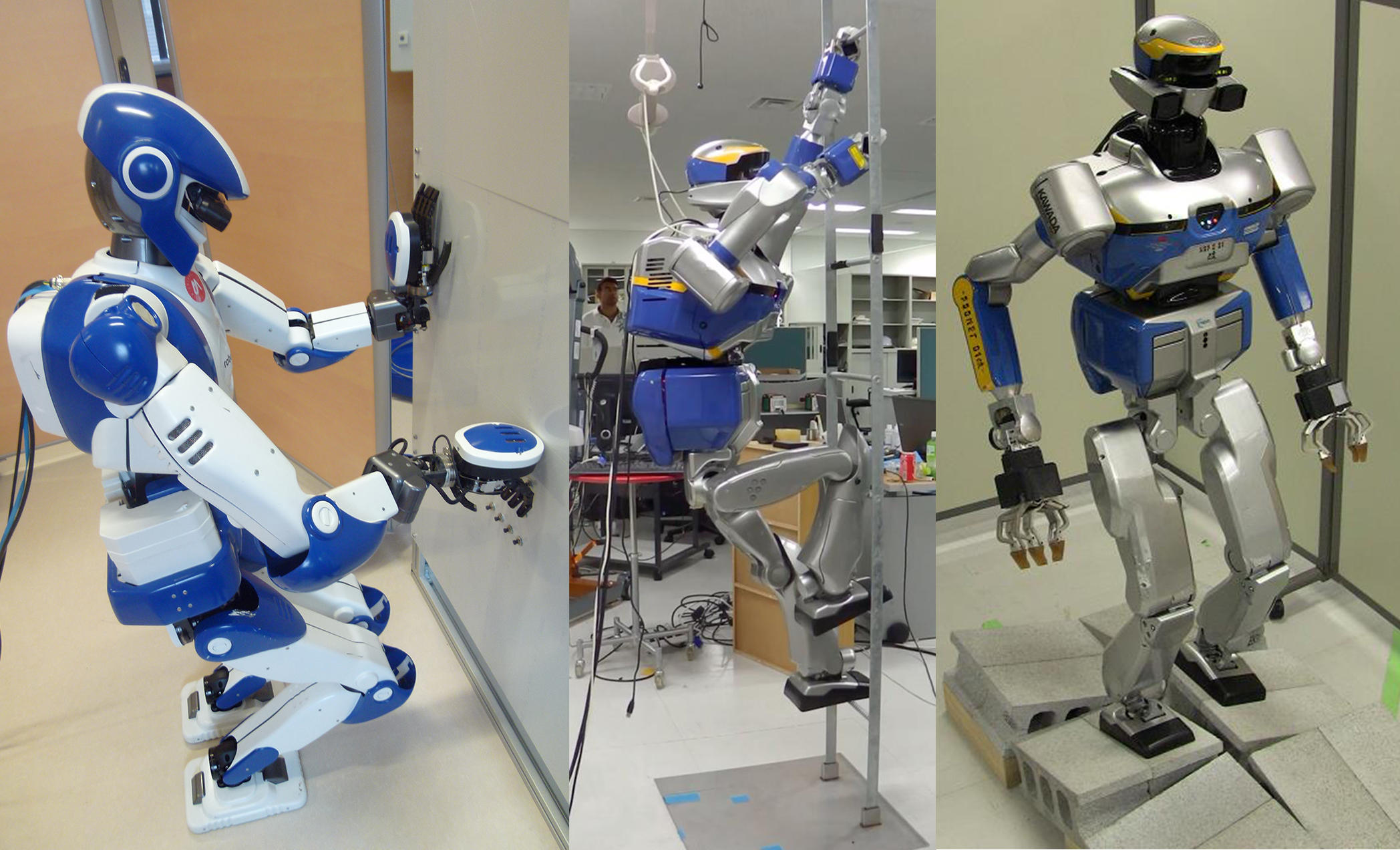
De son côté, le Joint Robotics Laboratory (JRL, CNRS/AIST) développe, à partir des modèles de robots HRP-2 et HRP-43, des nouvelles technologies de locomotion dites multi-contacts : en s’aidant de tout son corps pour prendre contact avec son environnement, et non seulement avec ses pieds, ce type de robot peut monter des échelles et entrer dans des endroits exigus. La possibilité d’avoir des contacts multiples permet aussi d’accroître la stabilité du robot et la force qu’il peut appliquer lorsqu’il effectue une tâche. De plus, la forme anthropomorphique de ces robots offre une polyvalence utile pour effectuer un grand nombre de tâches différentes dans des environnements variés.
La collaboration entre les chercheurs du JRL et Airbus Group a donc pour but de permettre aux robots humanoïdes d’effectuer des tâches de manipulation dans un environnement contraint et limité, les lignes d’assemblage, où ils devront faire un usage coordonné de leur corps pour mener à bien leur mission. Les espaces exigus requièrent en effet des postures particulières. Le calcul de telles postures s’avérant mathématiquement complexe, les chercheurs devront tout d’abord développer de nouveaux algorithmes, bien plus puissants que ceux existants actuellement, tout en gardant ces calculs suffisamment rapides pour que les mouvements des robots restent efficaces. Les tâches typiques que les robots auront à effectuer seront, par exemple, de serrer un écrou, de nettoyer une zone de ses poussières métalliques ou d’insérer des pièces dans la structure de l’appareil. Ils pourront également vérifier le bon fonctionnement des systèmes une fois la fabrication terminée.
Ces algorithmes seront testés sur un ensemble de scénarios tirés des besoins des différentes branches d’Airbus Group (Aviation Civile, Hélicoptères, et Spatial), et dont le réalisme ira croissant au fil des années. Du côté de la recherche en robotique, en plus de l’apport des nouveaux algorithmes, cette collaboration mettra peut-être en lumière des insuffisances des robots actuels (design, précision ou puissance, par exemple). Elle pourrait également permettre de spécifier le cahier des charges de la première génération de robots humanoïdes dédiés à la manufacture de grandes structures, d’ici 10 à 15 ans.
Source : cnrs
Dans l'actualité
- Revue du web #86 : les vidéos les plus étonnantes du biomimétisme robotique
- Peut-on rattraper le retard de la robotique française?
- Tour du monde de la robotique de service
- Le développement d’applications robotiques simplifié
- Un robot humanoïde capable de transmettre des connaissances entre les équipages de stations spatiales
- Les robots, danger ou opportunité ?
- Un coup de main à l’interaction homme-machine
- La mobilité vers l’aéronautique : les défis à relever
- Un robot aérien capable de modifier sa forme en plein vol
Dans les ressources documentaires