







Plus agiles, adaptatives, efficientes en énergie, plus légères, moins volumineuses... Les plantes inspirent les chercheurs en robotique. Pour preuve, Techniques de l’Ingénieur a choisi quatre projets aboutis ou en cours.
Lorsqu’elles se tortillent pour atteindre la lumière, se referment sur leur proie ou se faufilent dans le sol, les plantes font preuve d’une remarquable « stratégie » pour se développer. Ces capacités intéressent la recherche en robotique, même si les exemples de réalisations sont bien moindres que pour les modèles animaux. Un déséquilibre confirmé par la Dr Barbara Mazzolai du centre de micro-biorobotique à l’Institut italien de Technologie (ITT), coordinatrice des projets européens Plantoïd et Growbot, que nous développerons dans l’article. « Ceci est probablement dû à leurs principes opérationnels, qui diffèrent radicalement de ceux des animaux, et aux difficultés à étudier leurs mouvements et caractéristiques, expliquait-elle dans le magazine Projet*EU en mars 2014. Par conséquent, les plantes sont souvent considérées comme des organismes passifs, incapables de se mouvoir, de communiquer et d’échapper à un environnement hostile ». Ce qui est loin d’être la réalité ; la preuve avec ces trois travaux de recherche que Techniques de l’Ingénieur a sélectionnés.
Plantoïd déploie ses racines
Commençons par le projet de recherche européen Plantoïd, dédié à la robotique inspirée des racines des plantes pour la surveillance des sols. Financé par l’Union européenne (programme-cadre) et coordonné par l’Institut italien de Technologie (ITT), il s’est déroulé du 1er mai 2012 au 30 avril 2015 (36 mois). L’objectif de ce projet consistait à mieux comprendre les principes permettant aux racines d’explorer et de s’adapter de manière efficace et efficiente aux environnements souterrains, mais également la communication entre les apex pendant la croissance adaptative et les informations sensorielles pour la prise de décision collective.
Deux prototypes ont été réalisés : des arbres, dont les troncs de plastique ont été imprimés en 3D et qui embarquent de l’électronique. Les feuilles capteurs mesurent différents paramètres comme la température, l’humidité, la pesanteur, les facteurs chimiques. Sur l’un des deux prototypes, explique Science et Avenir, « les racines peuvent se déplacer en réponse aux stimuli envoyés par les capteurs placés à leurs extrémités et ainsi éviter un caillou ou une zone polluée » et sur l’autre, « le système racinaire-robot est capable d’une croissance artificielle ». Parmi les applications possibles : la détection de la concentration de nutriments, polluants, minéraux, eau dans le sol.
Ce projet a abouti à différentes publications scientifiques sur la flexion et la force dans un corps souple inspiré des racines, une nouvelle génération d’actionneurs souples hygromorphiques contrôlables électriquement, un nouvel outil de suivi pour l’analyse des mouvements du méristème ou encore un système mécatronique miniaturisé pour l’exploration des sols.
Growbot grimpe sur les murs
Un second projet européen – toujours financé par l’Union européenne et coordonné par l’ITT – a débuté en janvier 2019 (pour 48 mois) et est dédié quant à lui aux déplacements des plantes grimpantes. Baptisé Growbot, son objectif est de développer des robots de faible masse et de faible volume capables de s’ancrer et escalader une surface, ainsi que « négocier le vide » (elles poussent, parfois en suspension dans le vide, jusqu’à rencontrer une surface à laquelle s’accrocher). L’objectif est de réaliser des robots plus agiles, capables de se déployer et de se mouvoir sur des surfaces non planes. Le projet donne l’exemple des robots d’escalade basés sur des roues, des jambes ou des rails, qui se coinceraient ou tomberaient.
Ce projet a fait l’objet de quelques publications en 2020, notamment sur la circumnutation (les mouvements de flexion lors de la croissance) des racines, ou encore sur les trichomes (les « poils ») à la surface des plantes pour s’accrocher (et se décrocher).
Un bras robotique extensible
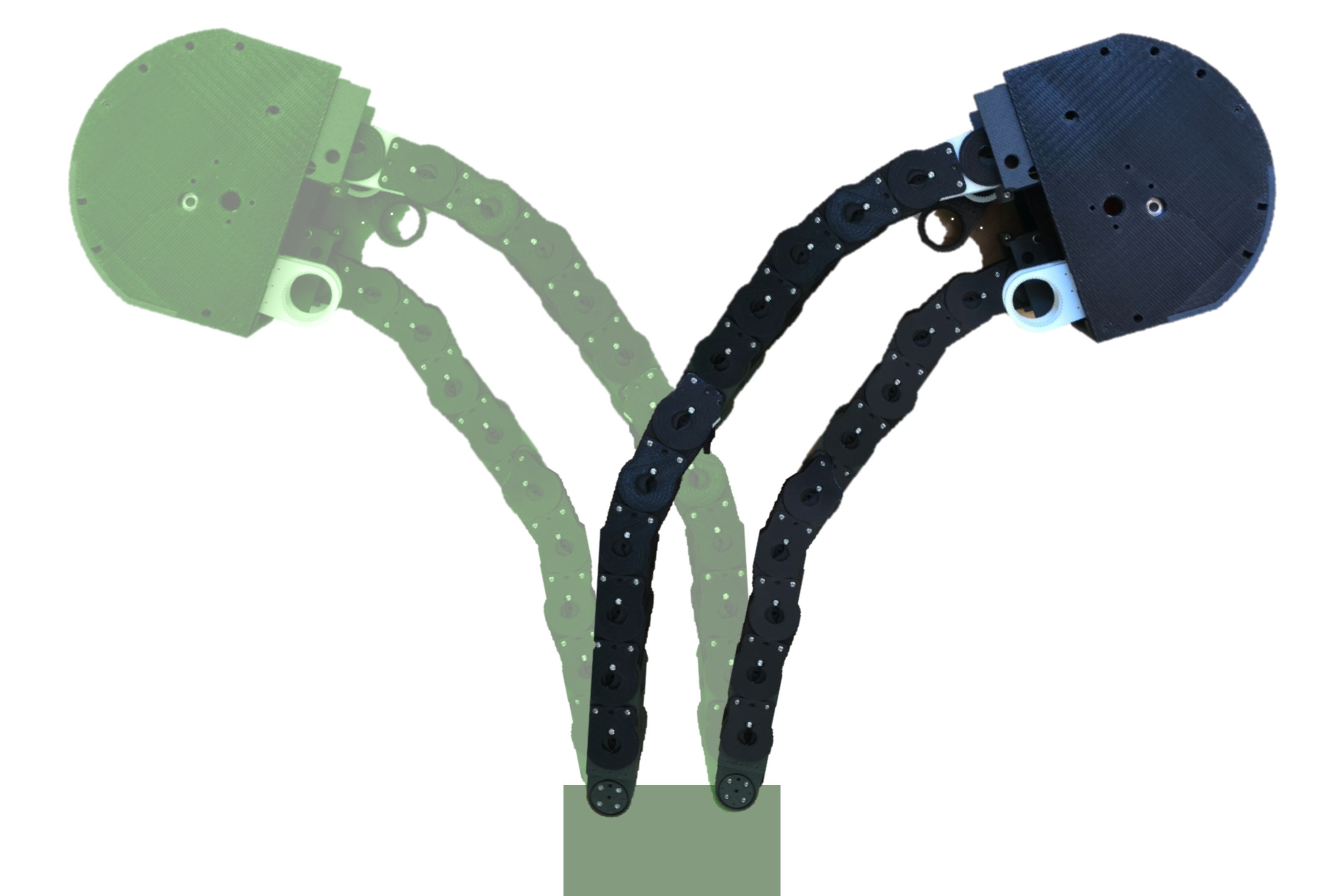
MIT a développé un bras robotique qui peut s’étendre dans différentes directions, comme pour atteindre une hauteur ou un endroit difficile d’accès. Présenté en novembre 2019, il s’inspire de la croissance des plantes, notamment la façon dont une jeune pousse se développe depuis sa graine à ses premières feuilles. Contrairement à la plante, le robot peut revenir dans son état initial et se recroqueviller. Il ne s’agit pas ici d’un robot souple, comme on pourrait l’imaginer, mais d’une chaîne à pignon pouvant être commutée grâce à un actuateur (moteur électrique permettant d’actionner une fonction) entre un état flexible et un état rigide.
Selon les auteurs de la publication, il peut supporter une charge importante, dispose d’une plaque pour fixer un effecteur final (comme une pince, par exemple) et transporter un objet.
Ces origamis réagissent à leur environnement
Loin de l’image traditionnelle du système robotique, ces robots plantes sont faits de papier. Les travaux réalisés par des scientifiques de l’Université de Bilkent (Turquie) ont été publiés dans Soft Robotics en août 2020. Ces origamis reproduisent deux propriétés d’autorégulation des plantes que sont l’héliotropisme et la nyctinastie. En d’autres termes, elles suivent le soleil et ouvrent leurs feuilles. Cette reproduction de la régulation biologique végétale a été obtenue grâce à un mécanisme de transpiration – de l’eau est injectée dans les origamis – en utilisant un hydrogel au niveau des jointures (zones préalablement coupées pour le dépôt d’hydrogel). Lorsque le gel est hydraté, l’actionneur reste plat (gonflé). A l’inverse, lorsque le gel est déshydraté, c’est-à-dire lorsqu’il s’assèche (transpiration) par l’éclairage (dans l’étude, avec une lampe infrarouge de 250 W), l’actionneur se rétracte en fonction de la quantité d’eau dans le gel (contracté) et fait basculer la plante de papier vers l’éclairage. Un tel système d’autorégulation pourrait être intéressant dans la conception de robots plus efficaces énergétiquement, par exemple.









Réagissez à cet article
Vous avez déjà un compte ? Connectez-vous et retrouvez plus tard tous vos commentaires dans votre espace personnel.
Inscrivez-vous !
Vous n'avez pas encore de compte ?
CRÉER UN COMPTE