Comment un insecte fait-il pour voler dans des endroits confinés ? Ou pour détecter une odeur à des centaines de mètres ? Pour répondre à ces questions, des scientifiques du CNRS, de l’Université de Lorraine et de l’Institut national de la recherche agronomique (Inrae) ont mis au point un robot guidé par des câbles permettant de suivre et filmer un insecte pendant son vol. L’objectif : avoir une meilleure compréhension de ses mécanismes de vol et de détection des odeurs. Nous avons échangé avec Dominique Martinez, l’un des chercheurs de l’équipe, pour mieux comprendre l’intérêt d’un tel dispositif qui a fait l’objet d’un article dans Science Robotics.
Techniques de l’Ingénieur : vous avez conçu un robot pour suivre le vol et le comportement olfactif des insectes. Pour quelles raisons ?
Dominique Martinez : Les insectes réalisent des prouesses en vol. Ils sont également capables de détecter des odeurs à distance et trouver des sources chimiques à des centaines de mètres. À l’heure actuelle, l’ensemble de ces mécanismes est mal compris. Pour étudier le vol des insectes, les scientifiques avaient recours à des méthodes rudimentaires telles que fixer l’animal sur une tige ou le mettre dans une boîte pour filmer le mouvement de ses ailes avec une caméra rapide. L’insecte ne volait pas vraiment, il n’était pas libre de mouvement.
Ce qui n’est pas le cas de votre technologie…
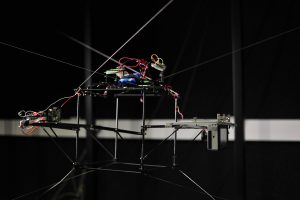
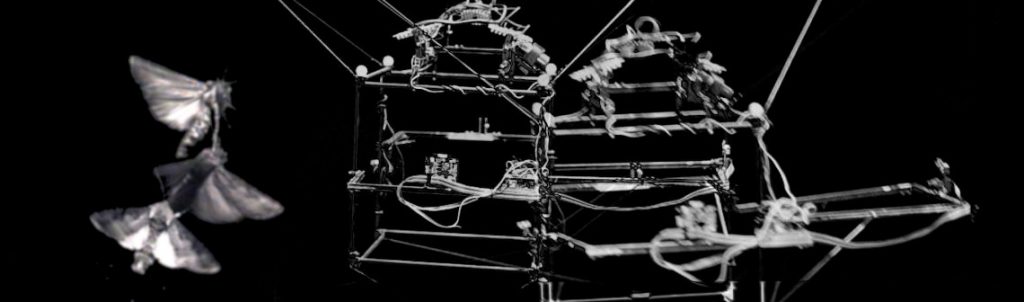
Nous laissons l’insecte libre de son vol. Nous avons réalisé un robot suffisamment rapide pour pouvoir accélérer et changer de trajectoire rapidement, sans perturber l’insecte. Le robot est un cube ouvert de 30 centimètres dans lequel l’insecte va être filmé en vol par plusieurs caméras dont deux infrarouges permettant de déterminer sa position en 3D par stéréovision. Ce cube est guidé par huit câbles actionnés par des moteurs, positionnés aux huit coins de la pièce. C’est l’ajustement de ces câbles qui permettra à la caméra de suivre l’insecte. Le suivi de l’insecte se réalise de façon autonome et en temps réel. C’est un ordinateur qui le contrôle. Grâce à notre technologie, nous avons réussi à suivre l’insecte à 3 m/s.
Pourquoi ne pas avoir utilisé un drone pour faire le suivi de l’insecte ?
Nous avons exclu le drone car les mouvements d’air induits par ses pales auraient perturbé l’insecte. Notre système est léger, les câbles sont fins, il fait peu de bruit et il introduit peu de turbulence. De plus, il est suffisamment performant pour réaliser des changements de direction ou faire des accélérations sans perturber l’insecte.
Vous avez démontré qu’il était possible de suivre l’insecte en vol. Comment étudiez-vous ses capacités olfactives ?
Nous sommes en train de placer un stimulateur olfactif sur le cube pour nous permettre d’envoyer des odeurs et voir, en fonction des échantillons envoyés, si l’insecte change de comportement. Par exemple, nous avons appliqué en collaboration avec l’Inra notre outil sur le papillon de nuit Agrotis ipsilon, un ravageur de cultures. L’insecte femelle, pour se reproduire, produit des phéromones sexuelles pour attirer le mâle. Grâce au robot, on va comprendre le comportement olfactif de l’insecte pour éventuellement voir comment empêcher sa reproduction.
Avez-vous d’autres projets en cours ?
Au laboratoire, nous réalisons des robots qui miment le comportement olfactif des insectes pour retrouver des sources chimiques. Dans le futur, on peut imaginer des robots battre des ailes comme les insectes dotés d’olfaction et effectuer des missions dans des lieux confinés pour détecter à distance des explosifs, par exemple. D’autres équipes travaillent également sur la réalisation de robot insecte. C’est le cas d’une équipe de recherche de Boston aux États-Unis qui a réussi à reproduire le vol à l’échelle d’un insecte grâce à des techniques de micro-fabrication. Leur Robobee pèse moins d’un gramme. Mais il y a une différence entre reproduire et contrôler. Le robot est tellement petit que l’électronique est difficile à embarquer : il a encore des fils, il n’a pas de batterie embarquée…
Dans l'actualité
- Imprimer des exosquelettes flexibles pour les robots insectes
- Ce robot abeille aux muscles mous résiste aux chocs pendant son vol
- L’intelligence artificielle, une aide à la conception des robots mouche
- Un robot colibri aussi agile que le vrai
- Un micro-robot qui flotte sur l’eau
- Un nez électronique qui analyse l’haleine et dépiste des maladies
- Alternatives aux pesticides : place aux odeurs !
- Robots biomimétiques : entre promesses et obstacles
- Des robots microscopiques contrôlés à l’aide de lasers
- Quelle éthique pour la robotique ?
Dans les ressources documentaires
- Le robot PARO® : un collègue comme les autres ?
- AntBot : un robot qui s’oriente comme une fourmi - Applications à la navigation à vue sans GPS ni magnétomètre
- Modélisation et commande des robots manipulateurs
- Modélisation des robots humanoïdes
- Actionneurs électromécaniques pour la robotique et le positionnement - Fondamentaux et structures de base